Tiếng
Anh
Tiếng
Anh

 Tiếng Anh
Tiếng Anh

Hệ thống gắp thả sản phẩm tự động
Hệ thống gắp thả sản phẩm tự động là gì?
Hệ thống gắp thả sản phẩm (Pick and Place) là phương pháp gắp các vật thể từ vị trí này và thả sang một vị trí khác.
Các nhiệm vụ đơn giản như nâng vật thể hoặc di chuyển chúng không đòi hỏi nhiều về suy nghĩ. Do đó, việc con người thực các nhiệm vụ này gây lãng phí, trong khi lực lượng lao động có thể thực hiện các nhiệm vụ khác đòi hỏi khả năng tư duy cao hơn.
Những nhiệm vụ lặp đi lặp lại này được xử lý bởi robot gắp và thả. Chúng được trang bị cảm biến và hệ thống thị giác để gắp vật thể khỏi băng chuyền đang di chuyển.

Hệ thống gắp thả sản phẩm Robot
Ứng dụng của hệ thống gắp thả tự động trong máy tự động?
Hệ thống gắp thả sản phẩm được ứng dụng nhiều trong ngành thực phẩm. Bên cạnh đó, một vài ứng dụng khác có thể kể đến như:
Ứng dụng trong lắp ráp
Trong quy trình lắp ráp, robot có thể gắp nhiều bộ phận từ nhiều vị trí và lắp ráp chúng tại một nơi. Các nhiệm vụ phức tạp trong môi trường độc hại có thể thực hiện bởi loại robot này.
Ứng dụng trong đóng gói
Robot gắp các mặt hàng thực phẩm và thả chúng vào hộp để đóng gói. Xếp các mặt hàng vào thùng chứa, hoặc gắp các sản phẩm từ băng chuyền.
Ứng dụng trong chọn lọc
Đây là một ứng dụng gắp thông minh khi robot có thể nhận diện và chọn lọc ra những sản phẩm được xác định trước dù các sản phẩm này bị xáo trộn. Chúng được trang bị cảm biến hoặc hệ thống thị giác để có thể xác định và gắp một cách chính xác.
Kiểm soát và Quản lý chất lượng sản phẩm
Robot kiểm tra và xác định từng mặt hàng để tìm hiểu xem mặt hàng đó có đáp ứng yêu cầu chất lượng của nhà sản xuất hay không. Nếu các mặt hobot có thể loại bỏ mặt hàng đó khỏi dây chuyền sản xuất.
Phân loại sản phẩm
Robot phân loại sản phẩm có thể sắp xếp các đối tượng khác nhau dựa trên hình dạng của chúng hoặc thông tin được cung cấp trên chính đối tượng đó. Chúng có thể được sử dụng để phân tách các bưu kiện hoặc cho các ứng dụng tương tự.
Ứng dụng trong Y tế
Robot gắp và thả cũng đang tìm kiếm ứng dụng của chúng trong lĩnh vực y tế. Chúng không chỉ giúp phân loại kho y tế mà còn có thể hỗ trợ trong các ca phẫu thuật phức tạp.
Hệ thống gắp thả sản phẩm ứng dụng trong kiểm tra chất lượng sản phẩm
Ưu điểm của hệ thống gắp thả sản phẩm tự động
Robot gắp thả sản phẩm có nhiều ưu điểm hơn so với sử dụng nhân lực trong cùng một công việc. Một vài ưu điểm có thể kể đến như:
Tốc độ
Đây là ưu điểm lớn nhất của loại robot này. Chúng có thể gắp và thả nhanh và nhiều chi tiết cùng lúc mà chỉ cần một công nhân vận hành.
Năng suất
Do tốc độ hoạt động cao hơn, robot gắp và thả có năng suất cao hơn so với con người. Đây là lý do tại sao các môi trường sản xuất hiện đại có thể tung ra nhiều sản phẩm hơn, để tăng tỷ lệ sản xuất.
Sự gián đoạn trong sản xuất
Khi công nhân giải lao và đổi ca sẽ dẫn đến sự gián đoạn trong quá trình sản xuất. Tuy nhiên, robot không cần nghỉ ngơi và có thể làm việc cả ngày lẫn đêm.
Tính nhất quán
Lao động của con người luôn mang yếu tố lỗi của con người. Tuy nhiên, robot sẽ hoạt động dựa trên các thuật toán chính xác. Vì vậy, sẽ không có lỗi và kết quả cuối cùng là hoạt động nhất quán.
Sự an toàn
Việc gắp sản phẩm liên quan đến yếu tố rủi ro khi vật rơi xuống người công nhân và gây thương tích. Tuy nhiên, robot không có rủi ro như vậy, dẫn đến độ an toàn cao hơn tại nơi làm việc.
Khả năng hoàn vốn
Robot gắp thả cho phép các công ty giảm thiểu chi phí vận hành, không cần lương và thưởng hàng tháng mặc dù đầu tư ban đầu lớn hơn. Điều này dẫn đến lợi tức đầu tư cao hơn trong các quy trình sản xuất.
Các loại Robot cho hệ thống gắp thả sản phẩm tự động
Cartesian Robots
Robot Descartes gắp và thả các vật thể đến các vị trí chính xác dựa trên hệ tọa độ X, Y và Z (tọa độ Đề-các) đã được lập trình trước đó.
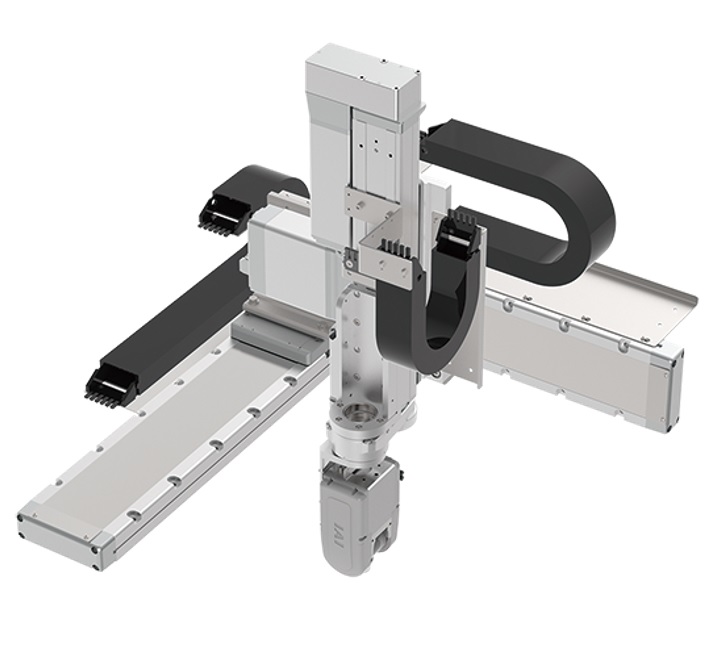
Hệ thống gắp thả sản phẩm Robot 3 trục
Robots gắp nhanh
Robot gắp nhanh gắp đồ ở tốc độ rất cao, vì vậy được sử dụng trong các ứng dụng có khối lượng lớn. Những robot này có khả năng di chuyển khoảng 300 sản phẩm mỗi giờ.
Cánh tay Robot
Cánh tay robot là loại robot gắp và thả đơn giản nhất và phổ biến nhất. Chúng được sử dụng làm cánh tay robot 5 trục và 6 trục. Cánh tay robot 6 trục hoạt động tương tự như Robot Cartesian nhưng có độ chính xác định vị thấp hơn so với Robot Delta.

Hệ thống gắp thả sản phẩm sử dụng cánh tay Robot
Delta Robots
Robot Delta có thể phân loại các vật thể và đặt chúng vào các nhóm có chung đặc điểm được lập trình trước. Những robot này có thể được trang bị cảm biến hoặc hệ thống thị giác để chọn các mặt hàng dựa trên màu sắc hoặc kích cỡ khác nhau.
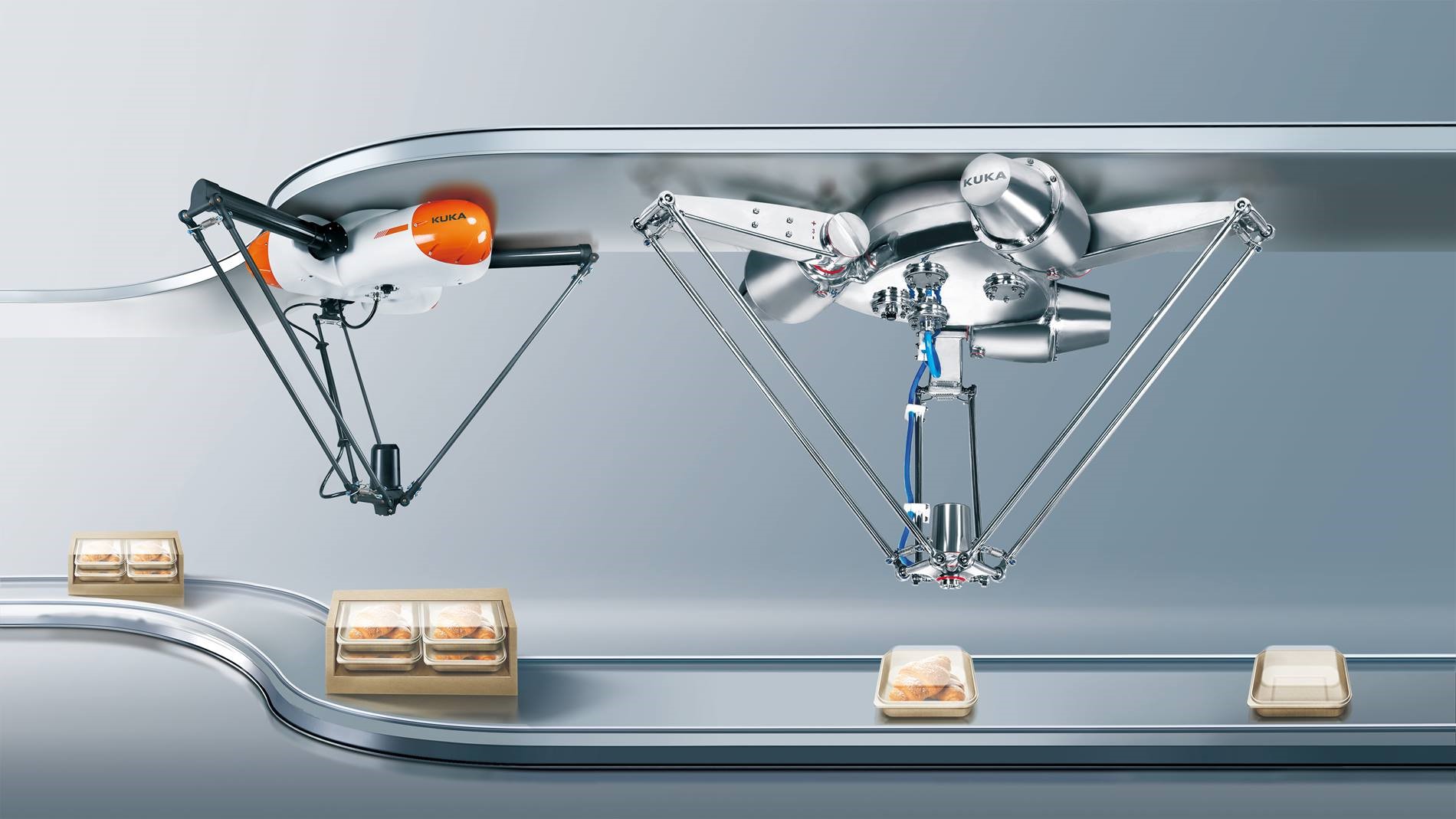
Hệ thống gắp thả sản phẩm sử dụng Robot nhện
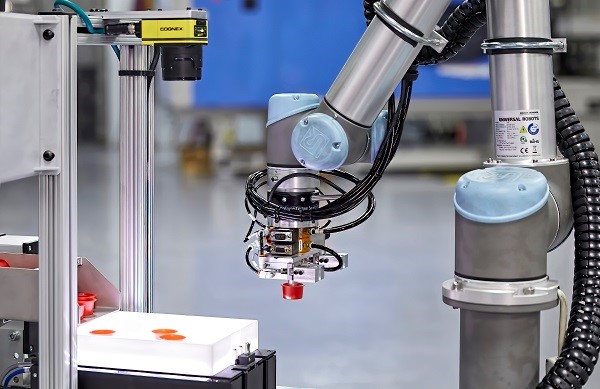
Collaborative Robots (Cobot)
Collaborative Robots được đặt tên như vậy (Robot hợp tác) bởi vì chúng làm việc cộng tác với con người. Mục đích của họ là hướng dẫn con người đến vị trí lấy hàng hoặc vị trí mong muốn. Những robot này có thể tạo lộ trình tối ưu để giảm thiểu thời gian vận chuyển.

Hệ thống gắp thả sản phẩm sử dụng Robot cộng tác ( Cobot)
Vấn đề của robot gắp thả sản phẩm
Có rất nhiều ứng dụng của robot gắp và thả sản phẩm được kể đến trong phần 2. Và với mỗi ứng dụng, mục đích sử dụng khác nhau sẽ có những vấn đề khác nhau. Trong phần này, chúng ta sẽ phân tích vấn đề chung nhất của loại robot này:
Sự an toàn
Đây là yếu tố tiên quyết trong việc thiết kế các loại máy móc. Và do đặc tính làm việc trong vùng không gian rộng, gắp thả các sản phẩm có khối lượng lớn (trong các dây chuyền tự động hóa; lắp ráp,…) nên sự an toàn cần đặc biệt chú ý.
Mất an toàn trong lao động sản xuất không chỉ gây thiệt hại về tài sản, mà nghiêm trọng hơn dẫn đến thiệt hại về con người. Vì vậy, là những kỹ sư thiết kế cần nâng cao nhận thức bản thân về vấn đề này hơn.
Các yếu tố dẫn đến mất an toàn.
- Yếu tổ chủ quan (do kỹ sư thiết kế):
Kết cấu không đảm bảo tính cứng vững.
Sắp xếp không gian làm việc không hợp lý.
- Yếu tố khách quan (do công nhân vận hành):
Công nhân vận hành quá không đảm bảo tuân thủ quy định về an toàn lao động, quá tải,…
Giải pháp
Để an toàn trong quá trình làm việc người kỹ sư thiết kế cần chú ý một số vấn đề sau:
-
Tính toán chính xác để đảm bảo sự vững chắc cho kết cấu.
-
Chọn vùng không gian làm việc phù hợp, tránh cản trở các công đoạn khác (layout vị trí).
-
Hướng dẫn công nhân về các trường hợp vận hành quá tải.
-
Người vận hành cần tuân thủ nguyên tắc an toàn trong sản xuất.
Tham khảo một số bài viết liên quan của CNC VINA